Kartierungskonzept
Welches Konzept lohnt sich?
Hinsichtlich Genauigkeit und Robustheit der Lokalisierung ist eine dichte 3D. Punkte Karte allen anderen Konzepten überlegen. Für dieses Konzept wird ein relative teurer 2D- oder 3D- Laserscanner sowohl für die Kartierung als auch für die Lokalisierung benötigt. Auf den 2D- Laserscanner am Fahrzeug kann man jedoch nicht verzichten, da er eine wichtige Rolle für die Personensicherheit spielt. Daher wird das dichte 3D- Punkte- Konzept als Karte ausgewählt.
Für die Kartierung wird eine 3D- Punktwolke benötigt. Diese wird von einem beweglichen 2D- Laserscanner generiert, da dieser kostengünstiger ist und eine bessere vertikale Auflösung liefert.
Für die Erstellung der Karte werden die kumulativen Fehler zuerst mit Graph- Optimierung mit Hilfe von g2o- Framework minimiert, danach wird die Karte mit einem lokalen Optimierungsverfahren schrittweise zusammengebaut.
Außerdem kann man die Vorteile der Kamera ausnutzen, wenn die Bild -Features auch in der Karte vorhanden sind. Damit ist die Erkennung der Landmarken mit Hilfe der informationsreichen Bild- Features noch leichter und eindeutiger. Aus diesen Überlegungen heraus wird die dichte 3D- Punkte Karte mit Bild- Features (Textur, Punkt Feature, Linien Feature, …) erweitert und ergänzt. Dafür müssen die Kameras bzgl. des Laserscanner kalibriert sein.
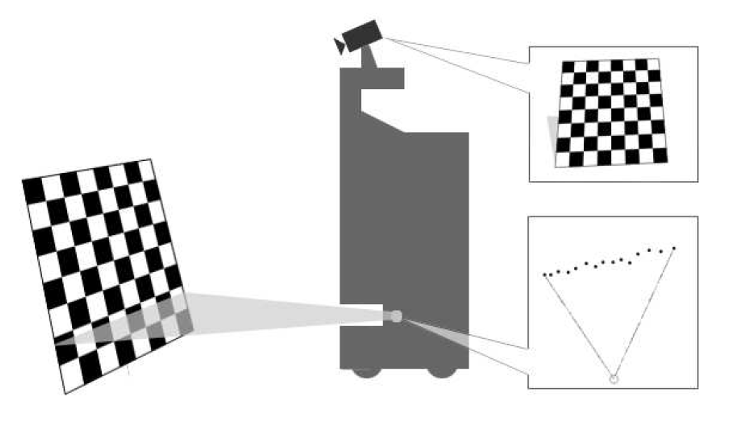
Die Kalibrierung des Kamera- Laserscanner
Für die Integration von Bild- Features in der 3D- Punkte- Karte, müssen die Lage und Orientierung der Kamera relativ zum Koordinatensystem des Laserscanners beschrieben und kalibriert werden. Die Parameter bestehen aus drei Elementardrehungen sowie einer Translation zum Koordinatenursprung. Mit diesen Parametern können Punkte im Laserkoordinatensystem in das Kamerakoordinatensystem, oder umgekehrt, transformiert werden. Die Transformation der Punkte vom Laserkoordinatensystem in das Kamerakoordinatensystem wird Projektion genannt. Die Kalibrierung der extrinsischen Parameter wird als Extrinsische Kalibrierung bezeichnet.
Die Semantische Information
Wie schon am Anfang erwähnt, erhöht die semantische Information das Abstraktionslevel einer Karte und erlaubt eine Darstellung der Umgebung als räumliche Strukturen. Die räumlichen Strukturen können z.B. die Pfadplanungsaufgabe in sehr komplexen städtischen Umgebungen begünstigen, oder das Zuordnungsproblem der Landmarken erleichtern.
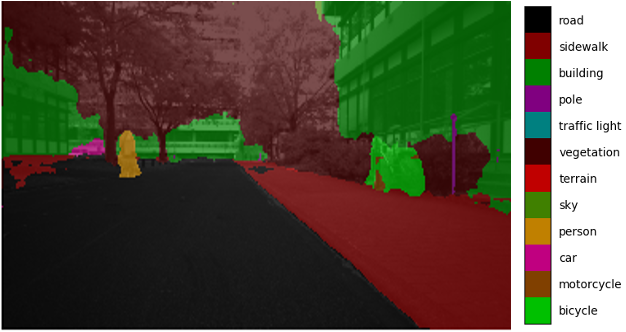
Eine semantische Karte kombiniert die geometrische Information und semantische Information zu einer gemeinsamen Umgebungsdarstellung. Die semantische Information kann z.B. durch die semantische Segmentierung mit Kamerabild erzielt werden. Hierbei wird jeder Pixel vom Bild einer Objektklasse (z.B. Radweg, Autobahn, Gebäude, Baum, …) zugeordnet. Vielversprechende Ergebnisse können bereits mit einer Deep Learning Methode erzielt werden. Ein state-of-the-art Beispiel dafür ist DeepLabV3 (Chen, Zhu, Papandreou, Schroff, & Adam, 2018) von Google, die die semantische Segmentierung durch Faltende Neuronale Netze in Echtzeit erlaubt. Abbildung 12 zeigt die Testergebnisse von DeepLabv3 im Außenbereich.
Ähnlich wie bei Einfärbung der 3D Punkte, man kann mit Hilfe der extrinsischen Kalibrierung die semantischen Label von der Image- Segmentierung auf die 3D- Punktwolke übertragen. Mit den gelabelten 3D- Punktwolken kann eine semantische Karte aufgebaut werden.